นักวิจัยสร้างหุ่นยนต์เป็นกองเรือที่รู้จักเรียนรู้เพื่อทำงานร่วมกันเป็นทีมได้เอง



ทีมนักวิจัยในโปรตุเกสพัฒนาหุ่นยนต์แบบเรือจำนวนหลายลำที่มีระบบประมวลผลและเครือข่ายประสาทเทียมในตนเอง โดยมีเป้าหมายเพื่อให้พวกมันรู้จักเรียนรู้ที่จะทำงานร่วมกันเป็นทีมได้เอง และตอนนี้หุ่นยนต์เหล่านั้นกำลังอยู่ในขั้นออกทดสอบกลางทะเล
งานวิจัยนี้เป็นผลงานร่วมกันของ University Institute of Lisbon และ University of Lisbon โดยมุ่งเป้าสร้างหุ่นยนต์กองเรือที่สามารถแบ่งเบาภาระของเจ้าหน้าที่ทางทะเล ซึ่งไม่เพียงจะทุ่นค่าใช้จ่ายในการออกปฏิบัติภารกิจ แต่ยังลดความเสี่ยงจากการที่ต้องนำเรือปฏิบัติการที่มีมูลค่าสูงนับล้านและเจ้าหน้าที่ผู้ผ่านการฝึกฝนลงพื้นที่เสี่ยงภัยจริงในทุกครั้ง
ดอกเตอร์ Anders Christensen หัวหน้าทีมวิจัยนี้ กล่าวถึงแนวคิดการใช้หุ่นยนต์ทำงานเป็นกลุ่มแบบกองเรือนี้ว่าเป็นการยกระดับงานพัฒนาหุ่นยนต์ไปอีกขั้น แทนที่จะเน้นการพึ่งพาหุ่นยนต์เพียง 1 หรือ 2 ตัวมาทำงาน ซึ่งไม่เพียงแต่จะต้องอาศัยเทคโนโลยีที่ซับซ้อนแล้ว ยังมีค่าใช้จ่ายที่สูง ทางทีมได้หันมาให้ความสนใจการใช้งานหุ่นยนต์ขนาดเล็กที่สามารถทำงานเป็นกลุ่มโดยมีต้นทุนต่ำกว่าและใช้การคำนวณและกระบวนการคิดที่ไม่ซับซ้อน
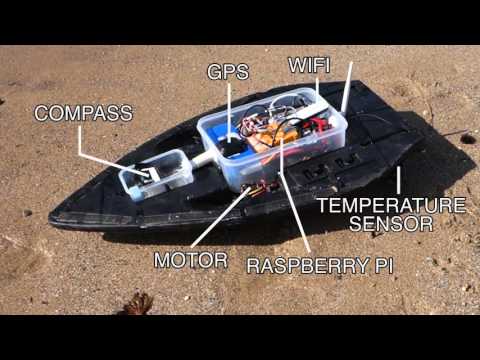
หุ่นยนต์ของทีมวิจัยที่ออกแบบเป็นเรือนี้มีตัวเรือทำจากโฟม polystyrene ที่ตัดแต่งขึ้นรูปด้วยเครื่อง CNC ส่วนประกอบชิ้นเล็กชิ้นน้อยอื่นๆ สร้างขึ้นด้วยการพิมพ์แบบ 3 มิติ ซึ่งมีต้นทุนรวมกันราว 330 ดอลลาร์ อาศัยมอเตอร์ขับใบพัดคู่เพื่อเคลื่อนที่ ด้านระบบอิเล็กทรอนิกส์นั้นทีมวิจัยใช้คอมพิวเตอร์ Raspberry Pi 2 มาเป็นศูนย์กลางควบคุมการทำงานทั้งหมดโดยมีโครงข่ายประสาทเทียมเพื่อการเรียนรู้การทำงาน มีชิป Wi-Fi ที่จะใช้ติดต่อสื่อสารกันกับหุ่นยนต์เรือลำอื่นๆ มีเข็มทิศกับอุปกรณ์ GPS เพื่อระบุตำแหน่งและทิศทางการเคลื่อนที่ในระหว่างปฏิบัติงาน และมีเซ็นเซอร์วัดอุณหภูมิ
จุดสำคัญของหุ่นยนต์เรือในงานวิจัยนี้คือการที่พวกมันทำงานร่วมกันโดยอาศัยการประมวลแบบกระจายศูนย์ ทีมวิจัยปล่อยให้พวกมันทำงานโดยประมวลผลด้วย Raspberry Pi 2 กันเองควรมีการเคลื่อนที่อย่างไรเมื่อได้รับคำสั่ง และด้วยหลักการเรียนรู้แบบ "Darwinian" ทีมวิจัยจะทำการคัดเลือกเอาหุ่นยนต์ที่ผ่านการทดสอบขั้นต้นในสภาพแวดล้อมจำลอง โดยเลือกเอาหุ่นที่พวกเขาเห็นว่ามีความฉลาดเพียงพอเหมาะสมไปสู่การทดสอบจริงกลางทะเลในขั้นต่อไป
ในพื้นที่ทดสอบจริงกลางทะเลซึ่งมีหุ่นยนต์เรือหลายตัวลอยลำอยู่นั้น หุ่นยนต์แต่ละตัวไม่ได้สนใจข้อมูลในภาพรวมว่าหุ่นทุกตัวในทีมอยู่ตรงตำแหน่งไหนและเคลื่อนที่อย่างไรบ้าง สิ่งที่พวกมันรับรู้และประมวลผลเพื่อเคลื่อนที่ให้สอดคล้องสัมพันธ์ไปด้วยกันนั้นมีเพียงหุ่นยนต์เรือตัวที่อยู่ข้างเคียงมันเท่านั้น (เช่นเดียวกับปลาหรือนกที่เคลื่อนที่กันเป็นฝูง พวกมันแต่ละตัวมิได้รับรู้ถึงการมีอยู่และเคลื่อนที่ของทุกตัวในฝูง สิ่งที่พวกมันเข้าใจการเคลื่อนที่มีเพียงปลาหรือนกตัวที่อยู่ข้างเคียงเท่านั้น)
ด้วยการเคลื่อนที่ไปเป็นกลุ่ม โดยหุ่นยนต์แต่ละตัวต่างเคลื่อนที่สัมพันธ์กับตัวข้างเคียง พวกมันสามารถทำงานตามคำสั่งได้หลายอย่าง อาทิ การรวมตัว, การกระจายตัว, การนำร่องไปยังพิกัดที่กำหนด, การเฝ้าระวังพื้นที่ (ซึ่งต้องอาศัยอุปกรณ์เก็บข้อมูลอย่างกล้องหรือเซ็นเซอร์เพิ่มเติม)
เป้าหมายขั้นถัดไปของทีมวิจัยคือเพิ่มเซ็นเซอร์ให้กับหุ่นยนต์เรือเหล่านี้เพื่อใช้เก็บข้อมูลต่างๆ และพัฒนาให้มันปฏิบัติภารกิจต่อเนื่องกันได้นานยิ่งขึ้น โดยหวังว่าในอนาคตจะสามารถสร้างหุ่นยนต์นับร้อยนับพันออกมาช่วยการปฏิบัติงานทางทะเลอย่างการเก็บข้อมูลด้านสิ่งแวดล้อมหรือการค้นหาและกู้ภัยทางทะเลได้สำเร็จ
ที่มา - Gizmag, เอกสารงานวิจัย